
It is estimated that the elderly population in Taiwan will reach 20% by 2025 [1], prompting growing concerns over an aging population. Meanwhile, government data from the 2018/19 English Housing Survey reveals that only 9% of homes in England have key accessibility features, though up from 5% in 2005 [2]. To prepare for an aging society in the future, high priority must be given wheelchair-accessible housing.
With the growing number of elderly individuals, mobility aids are becoming more prevalent, and most common of them is a wheelchair. Many families do not prepare for such situations when elderly members suddenly become dependent on a wheelchair after an illness or accidents. In this situation, there is an urgent need for them to alter the prevailing living environment by modifying their homes to make them wheelchair-friendly.
Recently, artificial intelligence and robotics technology have advanced to offer us with superior tools that can be used to address such challenges. The study has used these tools to analyze and develop ways of making homes better for wheelchair users. In this regard, the study focuses on the following:
The design, integration, and verification of low-cost autonomous robot cars for applying SLAM.
Application of SLAM and simulation technologies to existing homes in order to evaluate them for wheelchair accessibility.
Analysis of the possibility of modifying new homes in New Taipei City for wheelchair accessibility, focusing on kitchen design as a test case.
The rest of this paper is structured as follows. Section 2 presents computer-aided simulation of robots, SLAM, robot operating systems, and accessible home design for wheelchairs. Section 3 explains the research method employed in this study. In Section 4, design, construction, and hardware/software integration of an autonomous robot car are presented. Computer-aided simulations were done for SLAM, and actual on-site testing was performed afterward. Section 5 analyzes home floor plans in New Taipei City and finds significant design challenges. Additionally, SLAM technology is used to create accurate indoor maps, highlighting its limitations and proposing future applications in improving wheelchair accessibility across various travel-related scenarios. Section 6 presents our conclusions.
Computer-aided design (CAD) involves using software to assist in design modeling, analysis, review, and documentation [3]. CAD is applied across various fields including furniture design, product design, mechanical design, transportation design, architectural design, and interior design. Every CAD software has its use; KeyShot is for 3D rendering [4], Sweet Home 3D is for interior design [5], and Moi 3D is for creating 3D models [6]. Furthermore, Computer-Aided Simulation often complements CAD by providing a virtual prototyping platform. Virtual prototypes allow designers to test the physical components without the requirement of actual products or parts. Furthermore, simulation applications offer students integrated tools that allow them to learn robotics, 3D modeling, programming, artificial intelligence, computer vision, and artificial life, among many others [7].
These can cut time and cost during design. Thus, the significance of computer-aided simulation is underscored here. In 2013, a robotic computer-aided simulation software called V-REP (since renamed CoppeliaSim) was introduced. It is a versatile, scalable, and powerful general-purpose robot simulation framework. By simplifying the deployment of simulation models, CoppeliaSim makes simulation more accessible to the general public [8]. A strong alternative candidate for simulation is Gazebo, which offers a rich environment to quickly develop and test multi-robot systems in new and exciting ways [9]. RViz is another alternative candidate for simulation; it helps users visualize and understand any hidden insights in input information [10].
Amongst the most researched subdomains of robotics, SLAM stands out. An easy-to-understand illustration of the SLAM process comes in the form of the following hypothetical example [11]. It is a technique to grasp the 3D geometry of an unknown environment and keep track of the motion of sensors in that environment. Early SLAM algorithms were integrating various sensors, including laser range finders, rotary encoders, inertial sensors, GPS, and cameras [12]. In recent years, LiDAR-based Simultaneous Localization and Mapping (LiDAR-SLAM) gained significant attention. It employs LiDAR sensors for self-localization by observing the environment features and gradually constructs a map of the surroundings. This approach allows simultaneous localization and mapping in unknown environments [13]. LiDAR sensors are effective for creating 2D maps in unknown places and can estimate their location by the sensed landmarks. Hence, utilizing LiDAR sensors for SLAM increases the capabilities of several robotic systems related to flight control, obstacle avoidance, navigation, etc. [14].
The Robot Operating System (ROS) is a set of software frameworks for robot software development that significantly accelerates robotics research through its freely available components and modular structure [15]. The framework’s commercial success depends on the use of ROS to design simple, affordable, mass-market robots [16]. ROS is also an open-source operating system designed with fine-grained modularity, where systems are typically composed of numerous nodes. The term “node” can be used interchangeably with “software module” and originates from the visualization of ROS-based systems during runtime [17]. However, one of the most common challenges faced by ROS engineers is connecting physical robots to robot simulations using the ROS infrastructure [18]. Therefore, after constructing the robot hardware, it must be connected to ROS to enable effective control of the robot’s movements.
People with disabilities share the basic needs of other people such as health care, simple services, shelter, and income [19]. However, for many people with disabilities, home design fails to meet most of their requirements in residential areas regarding accessibility, smooth movement, and usability. This is because most of the home designs are assumed to be held for a person without any physical impairment [20]. There are the elderly and patients with spinal injuries, lower limb injuries, or cerebral palsy who require different types of wheelchairs depending on their conditions. Consequently, the indoor spatial arrangement has to be adjusted according to their needs. The access of wheelchair users to all areas should be easy and practical. For navigable space in an accessible-kitchen design, clearance at doorways and hallways must be at least 81.28 centimeters wide and no more than 60.96 centimeters long in the direction of travel. Thresholds at doorways must also be removed [21], as seen in Figure 1.
The design of accessible homes should consider appropriate space dimensions for wheelchair users, furniture sizes, wheelchair-friendly technologies and installations, and areas that require special design features, such as bathrooms, bedrooms, and kitchens. Smart home technology can help make life safer and more dignified for people with disabilities, but designers and users should be aware of its limitations [22]. Smart homes can be used to address some of the challenges related to aging, disabilities, and disease; however, they cannot be used to solve all challenges [23]. Designers can use their design skills to meet the needs or improve the living conditions of elderly adults or the disabled.

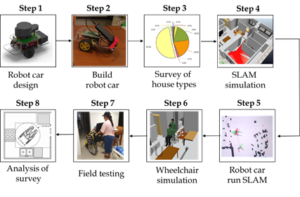
This study has been divided into two parts. The research methodology consists of eight stages. The first part was the application and simulation of SLAM, and the core concept was that it would make use of Simultaneous Localization and Mapping (SLAM) and computer simulation technology in predicting the needs of and assisting wheelchair users. This would be to find problems and give possible solutions to them in existing housing as well as designing accessible living rooms for the wheelchair. The second part would look into whether new houses could be adjusted to allow for accessible kitchens in New Taipei City. 3.1.
This includes the design, assembly and testing of an autonomous robot. Moreover, it had used SLAM and computer simulation technology to plan an accessible living space for users of a wheelchair. Next, the study used a case study of the users’ homes. The research process included six stages – the design, assembly and SLAM simulation of an autonomous robot, computer simulation of the movement of wheelchair, SLAM, followed by the actual operation of the wheelchair. This experiment tested two robots: GoPiGo and ROW0195.
The testing environment for this study was the home of a wheelchair user in New Taipei City, Taiwan. The wheelchair user wa an 85-year-old woman who was unable to move independently and required assistance from a caregiver or family members. The testing environment was an apartment in a building with an elevator for residents. There were three bedrooms, two bathrooms, and a common space for a living room and dining area.
Among those areas frequently used were the living room and dining area, the bathrooms, entrance, bedrooms, and also living room. Hence the testing environment was those spaces that happened to be indoors. Research with the second part sought to investigate and analyze changes brought about in new houses of New Taipei City transformed to become wheelchair-accessible kitchens. There were two stages in the process, which included the survey of home types and analysis. A total of 137 new home floor plans in New Taipei City was gathered. They were classified into eleven home types, covering the five districts of New Taipei City. The data sources are the on-site visits of new construction projects, information from the Internet, and information in housing magazines. The main objective of the research was to determine if these eleven types of houses are good candidates for adaptive kitchen layout changes by cross-checking their floor plans. In this study, methods used have been descriptive statistics and a test of chi-square. Here, the software used to analyze the statistical data obtained is Minitab Statistical Software, see Figure 2.
In this step, we planned the autonomous robot car and used 3D software for the design, which included Moi 3D, Solid Edge, Sweet Home 3D, and KeyShot. Considering cost and expandability, the autonomous robot car was designed by adding LiDAR to a Raspberry Pi-based GoPiGo robot car, as shown in Figure 3. The original design of the robot car was modified using Moi 3D. Using Solid Edge for engineering drawings, Sweet Home 3D to layout home designs of wheelchair-accessible homes, and rendering with KeyShot, these robot parts were designed 3D according to actual materials. All of this software is free or costs pennies to use educational.

A mileage counter can be used to calculate the distance traveled by the robot car. The distance traveled can be determined by measuring the rotational speed of the left and right wheels and multiplying the rotational speed by the circumference of the wheels. To calculate the change in direction of the robot, we use the following formula: \[\Delta \emptyset = (D_R-D_L) / W , \tag{1}\] where \(D_L\) is the distance moved by the left wheel, \(D_R\) is the distance moved by the right wheel, \(\Delta \theta\) represents the change in direction and \(W\) is the distance between the wheels.
This formula helps determine how the robot’s direction changes based on the distances traveled by each wheel. To calculate the new position based on the change in distance and direction, we use the following formulas for the new X and Y coordinates: \[\Delta D=(D_L+D_R) / 2 , \tag{2}\] \[X_{NEW} = X_{OLD} + \Delta D cos \left(\emptyset +\Delta \emptyset /2\right), \tag{3}\]
\[Y_{NEW} = Y_{OLD} + \Delta D sin \left(\emptyset +\Delta \emptyset /2\right), \tag{4}\] where \(\Delta D\) is the change in distance, (\(X_{OLD}\),\(Y_{OLD}\)) are the previous coordinates and (\(X_{NEW}\),\(Y_{NEW}\)) are the new coordinates.
The odometer calculated the distance and angle changes of a moving object and estimated its current position and direction based on this information. However, it also accumulated errors over time, leading to significant inaccuracies in calculations involving prolonged periods of movement [24].
After completing the design of the automated robot car, we started to modify the Raspberry Pi-based GoPiGo robot car [18]. We first assembled the GoPiGo robot car. At this stage, we referred to the assembly manual for the installation of the wheels, motors, acrylic plates, copper columns, wiring, AAA battery holder, GoPiGo PCBA, and Raspberry Pi PCBA. With a power pack to support testing for extended periods, the next procedure was to replace the AAA battery holder. We finally mounted the LiDAR on the original GoPiGo robot car and 3D-printed the parts to fix it into the acrylic plate. We were then able to successfully complete the assembly of a robot car for this study. Then, having assembled the robot, the following step involved connecting the robot to the ROS so that control can be achieved through a tablet or laptop (Figure 4).
We began by connecting the robot to an external monitor using HDMI and also a power supply, keyboard, and mouse. Once every thing was in place we turned on the power to boot up the operating system. The next step was to connect to a wireless network and note the IP address of the network. This IP address allowed us to connect to the Raspbian for Robots system on the automated robot car from a tablet or laptop browser. This system has much application software for editing or controlling this robot car, such as Python, Scratch, C, etc.

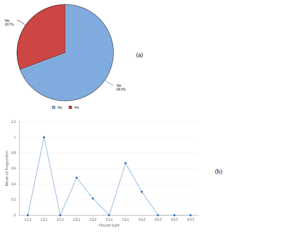
For this research, we undertook a series of surveys of pre-sale homes in New Taipei City across five districts: Taishan District, Wugu District, Yingge District, Sanxia District, and Shulin District. Altogether, we obtained 137 home floor plans. The homes were categorized into eleven types, namely: (1,1,1) for one bedroom, one living room, and one bathroom; (1,2,1) for one bedroom, one living room, one dining room, and one bathroom; (2,1,1) for two bedrooms, one living room, and one bathroom; (2,2,1) for two bedrooms, one living room, one dining room, and one bathroom; (2,2,2) for two bedrooms, one living room, one dining room, and two bathrooms; (3,1,1) for three bedrooms, one living room, and one bathroom; (3,2,1) for three bedrooms, one living room, one dining room, and one bathroom; (3,2,2) for three bedrooms, one living room, one dining room, and two bathrooms; (4,2,2) for four bedrooms, one living room, one dining room, and two bathrooms; (4,2,3) for four bedrooms, one living room, one dining room, and three bathrooms; (4,3,2) for four bed-rooms, two living room, one dining room, and two bathrooms. In Figure 5, the following pie chart depicts the home types that the new housing in New Taipei City follows:
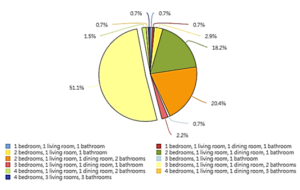
The results of the study show that (3,2,2) is the most common home type in this study, with a total of 70 (51.1%), followed by (2,2,2) with 28 (20.4%), then (2,2,1) with 25 (18.2%). The three home types accounting for the highest proportions of homes in this study are shown in Figure 6.

Following design, construction, and integration of the autonomous robot car, we used computer-aided simulation for simultaneous localization and mapping, made use of the robot for executing simultaneous localization and imaging the home’s physical space, and used computer-aided simulation of navigation of the wheelchair. The final step was on-site testing to analyze the results of computer-aided simulation and on-site testing.
We had constructed a 3D model of a house’ interior using computer-aided design. We make use of two types of computer-aided design tools in this work namely Moi 3D and Sweet Home 3D. In this way, we modeled the internal walls using Moi 3D first, afterwards modeled the windows, door frames, and doors through Sweet Home 3D. We then added furniture and fixtures such as a TV, sofa, cabinets, bed, bathtub, sink, and toilet to the simulated environment. After developing the 3D model of the interior, we utilized a 3D simulation environment tool called CoppeliaSim, along with a SLAM plugin. We developed an autonomous robot car with similar functionalities and used it to carry out simulation work for simultaneous localization and mapping.
We see on the computer screen two windows: the larger window showing the movement of the autonomous robot car as it navigates and scans the interior with infrared sensors, and the smaller window showing the results of simultaneous localization and mapping, as shown in Figure 7.

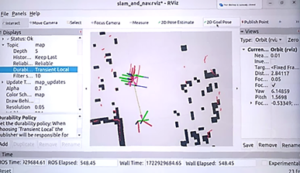
We used a LiDAR-equipped ROW0195 robot car to obtain mapping data. However, interpreting this data can often be challenging, so we made use of Rviz, a visualization tool included with ROS [25] for analysis.
We placed the LiDAR-equipped ROW0195 robot car in the home to be assessed. Next, we linked the robot car to the notebook. We use Ubuntu with ROS on the notebook and applied the teleop twist keyboard of ROS Package to control the robot car’s movement. At the same time, the LiDAR scanned the indoor space and displayed the map from the Rviz application. Rviz presented a rough indoor map, as shown in Figure 8. We controlled the robot car by keyboard to move forward or turn, the Lidar made a scan while the robot car moved. Then the robot car moved to the next location and continued to make measurements. Simultaneously, we applied Rviz’s visualization tool in the notebook.Then, the LiDAR was used to convert the data into a usable map.
Several SLAM packages are available for ROS, including Gmapping, Karto SLAM, and Cartographer. Gmapping requires both LiDAR and odometry data, Karto SLAM requires only LiDAR data, and Cartographer can build maps using only LiDAR data, though with reduced accuracy. We saved the generated map files from simultaneous localization and mapping.
In this study, we used CoppeliaSim’s 3D simulation environment tool to simulate a wheelchair’s movement, as shown in Figure 9. This included assessing whether collisions occur during movement and selecting a wheelchair with an appropriate width. It was also critical to assess whether adjustments to furniture layout in the home are needed. For example, furniture that frequently obstructs wheelchair movement may need repositioning. The computer could simulate the turning radius of a wheelchair in the bathroom. It was able to help identify a more suitable bathroom space or the need for a smaller wheelchair.

The final step of this research was on-site testing. We went to the residence of an 85-year-old female wheelchair user with a Karma SM-100.3 wheelchair. Two research assistants, a 49-year-old male and a 26-year-old female, supported testing. The results were in line with computer simulation. Collisions most often happened with wheelchairs and backrest chairs in the corridor connecting areas of the dining room and kitchen. It is recommended that the type of wheelchair used be replaced with armless models. In addition, the computer simulation indicated that the bathroom on the left would have better space utilization compared to the bathroom on the right. The on-site testing confirmed this finding. Because the wheelchair user could not turn around in the bathroom on the right, it suggested that the wheelchair user use the bathroom on the left.
This study recommends that wheelchair users use smaller wheelchairs (with a 40 cm \(\mathrm{\times}\) 40 cm seat). Using larger wheelchairs may lead to collisions. Also, wheelchair users may not be able to pass through corridors connecting the dining and kitchen areas. If the wheelchair user’s home was built a long time ago, then the floor plans can only serve as a reference. Due to the fact that the indoor layout may change with time, a resurvey of the indoor conditions is therefore needed. As a result, SLAM can offer real-time up-to-date floor plans, including the location of furniture and appliances, which is very helpful for planning wheelchair-accessible homes and avoiding mismatches between 3D design models and the physical environment of the home.
In this study, we selected the six most common home types: (3,2,2), (2,2,2), (2,2,1), (2,1,1), (3,2,1), and (4,2,2) (see 2.4 for definitions). There are two options for modifying a kitchen for wheelchair accessibility: yes or no, as shown in Figure 10.
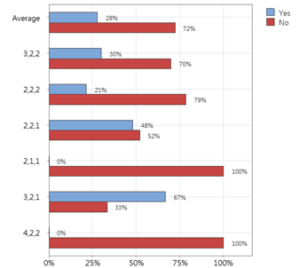
Next, we apply the chi-square test to check which home types are suitable for adaptation to accessible kitchen provision. Since the obtained p-value is 0.106 (p > 0.05), we cannot claim that there is a correlation between types of homes and the amenability of modifying the kitchen to be wheelchair-accessible. There is no evidence to conclude that the outcome percentage profiles differ among themselves at the 0.05 level of significance. Thus, statistical evidence indicates that there are no specific types of homes suitable for modification to offer accessible kitchens.
People often consider large homes to be best suited for modification into accessible homes. However, this is not true because Taiwanese homebuilders often split large houses into many rooms, and the rooms can be slightly larger than those in small houses. The same thing is also applicable to the kitchen space in large houses. So even if the home type (4,2,2) has four bedrooms, one living room, one dining room, and two bathrooms, we may see that the kitchen area is still not large enough for wheelchair users to navigate around, as in Figure 11. On the other hand, the kitchen in a small home is not inherently unsuitable for wheelchair users, provided that the kitchen and dining room are combined in one space, as in the right panel of Figure 11. In short, the study found a kitchen suitable for wheelchair-accessible homes has less to do with the home size than whether the kitchen and dining room are combined in one space.

Among the 137 home floor plans and eleven types in this study, we found that homes with one bedroom, two living rooms, and one bathroom (1,2,1) are most amenable to modification. In the study, 30.7% of new homes could be easily modified so that their existing kitchen is wheelchair-accessible. This means however that 69.3% of new homes have a kitchen space that is not easily modified to be wheelchair-accessible. Among the three home types depicted in the figure, home type (1,2,1) has the largest share that can readily be transformed, followed closely by (3,2,1) and then (2,2,1), Figure 12.
This includes 69.3% of kitchen spaces in this study that cannot be modified to be accessible for people in wheelchairs and consist of the following types: long and narrow, too small in area, with poor traffic flow, and kitchens at the home entrance, as shown in Figure 13.
The first type is the kitchen with an elongated space. This design makes it impossible for the wheelchair to turn around, not even at the end of the kitchen.
The second type is a too small kitchen design. In Taiwan, such kitchens usually only have an induction stove and a sink. In the case where a refrigerator is also placed in the kitchen, space for turning the wheelchair is constrained even more. It is also more likely that the refrigerator cannot be opened then that the wheelchair cannot enter the kitchen.
The third one is a kitchen with bad traffic flow design. The design is such that it would be impossible to open the refrigerator door once a wheelchair user enters the kitchen.
The fourth is a kitchen that is positioned at the entrance of the home. This design is a compromise that builders make to save space. The kitchen is immediately visible when entering the home. In such kitchens, a wheelchair user may need to exit the home to turn around.

The potential solutions or suggestions for these challenges are as follows:
Since kitchens with an elongated shape hinder wheelchair users, it is recommended that designers aim for square kitchens, which allow more space for wheelchair turning.
It is recommended that situating the kitchen at a home’s entrance be avoided, since such a layout is dangerous in the event of a fire, especially for wheelchair users.
Home designers should avoid a spatial layout for a kitchen that may hinder the opening of a refrigerator.
Home designers should avoid kitchens that are too small.
It is preferable to design the kitchen and dining room as a shared space, rather than dividing them into separate rooms as is common practice in Taiwan.
The designed mobile robot was an SLAM technology-based integration into the Robot Operating System (ROS). It utilized LiDAR in collecting positional data, which can be utilized for making accurate mappings of indoor spaces. This mapping can then be compared with the original floor plan to identify the position and dimensions of added furniture, home appliances, decorative items, and other physical objects in the space. In this way, the method is able to represent the indoor space precisely. However, we also found limitations of SLAM technology in indoor environments, for example, when dealing with uneven floor surfaces, transitioning to different floors, climbing stairs, the LiDAR’s optical resolution, and spaces the robot cannot access. Because of these constraints, the constructed map might be incomplete. Alternatives are larger robotic vehicles, robotic dogs, or airborne drones. These approaches would naturally add cost to measurement devices. The new robot of this experiment is more realistically priced and well suited for an educational setting.
Where might this welfare technology have wider applications in the future?
We also know that the percent of elderly people is bound to rise, and we are thus required to factor the requirements of old people, like air travel, railway travel, designing a motor home, and the designs for motor way service station in order to provide these elderly people more confidence toward access. Utilizing similar technology as with this work, robots are capable to map the internal space in a vehicle-for instance airplanes’ interior space, interiors of train carriage and motors. The designer can then use simulation software to calculate the minimum space needed for wheelchair users, followed by field testing.
This paper presents an application of SLAM and simulation to assist in the planning of homes accessible for wheelchair users to benefit designers and wheelchair users alike.
The study identified several issues that arose during the process of using the autonomous robot car to map the inside of homes. For example, the LiDAR resolution was too low to generate adequate maps; hence, there exist large discrepancies with computer simulations. Real-world application challenges still remain and need additional research. Computer simulation for wheelchair movement is compared against simultaneous localization and mapping; it shows good predictive accuracy. The technique enables the designer to identify potential flaws, including planning for accessibility of a home. Field testing with an actual wheelchair is not necessary until planning is complete. Furthermore, the survey of 137 floor plans of New Taipei City homes showed that 69.3% cannot be easily modified so that their kitchens can accommodate wheelchair users. The less adaptable kitchens include those with long and narrow layots, small floor areas, poor spatial layout, or those situated at the home’s entrance. These factors make it hard for wheelchair users to maneuver or perform such tasks as turning around or opening a refrigerator and deserve further research to improve the accessibility of kitchens for wheelchair users.